- Difficulté :


- Temps : 180 min



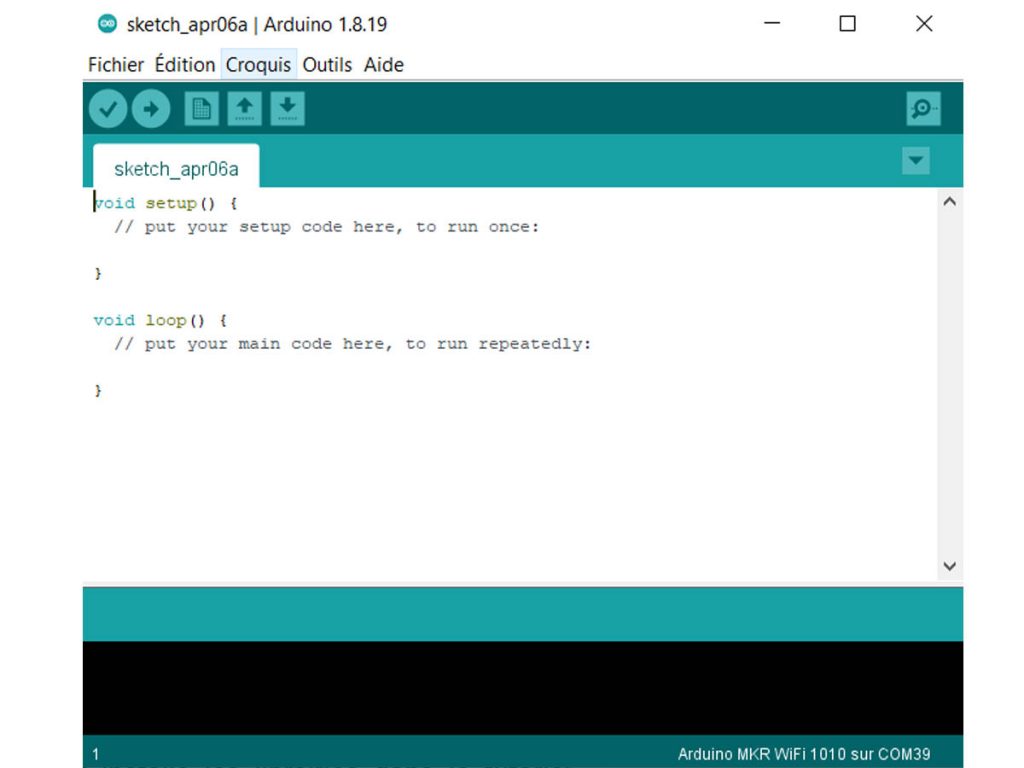
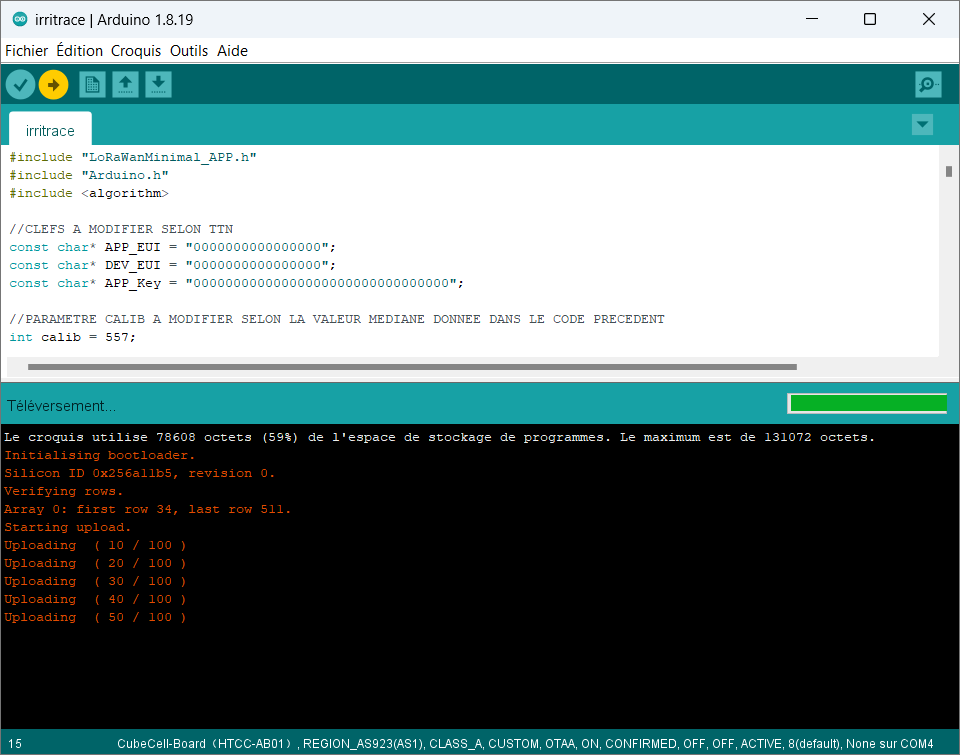
Etape 4 : Cliquez sur le bouton ![]() en haut de la fenêtre Arduino. C’est parti ! L’opération peut prendre quelques secondes. Son avancement est écrit en orange dans la section noire en bas de la fenêtre. (10%…20%… etc)Si vous n’avez pas de bug, il doit être écrit quelque-part « Téléversement terminé ».
en haut de la fenêtre Arduino. C’est parti ! L’opération peut prendre quelques secondes. Son avancement est écrit en orange dans la section noire en bas de la fenêtre. (10%…20%… etc)Si vous n’avez pas de bug, il doit être écrit quelque-part « Téléversement terminé ».
Sinon, nous vous invitons à lire cette page pour identifier le bug
Etape 5 :
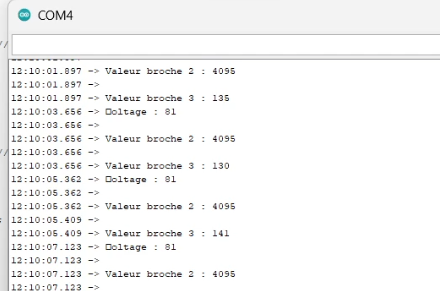
Maintenant, cliquez sur l’icône de la petite loupe  située en haut à droite de la fenêtre Arduino. Cela ouvrira une nouvelle page. Assurez-vous de vérifier que le « baud » en bas de cette page est fixé à 115200 (et non à 9600). Si tel est le cas, vous devriez voir les valeurs provenant du capteur s’afficher.
située en haut à droite de la fenêtre Arduino. Cela ouvrira une nouvelle page. Assurez-vous de vérifier que le « baud » en bas de cette page est fixé à 115200 (et non à 9600). Si tel est le cas, vous devriez voir les valeurs provenant du capteur s’afficher.
A l’aide d’une règle, vérifiez que le capteur ne donne pas des valeurs aberrantes !
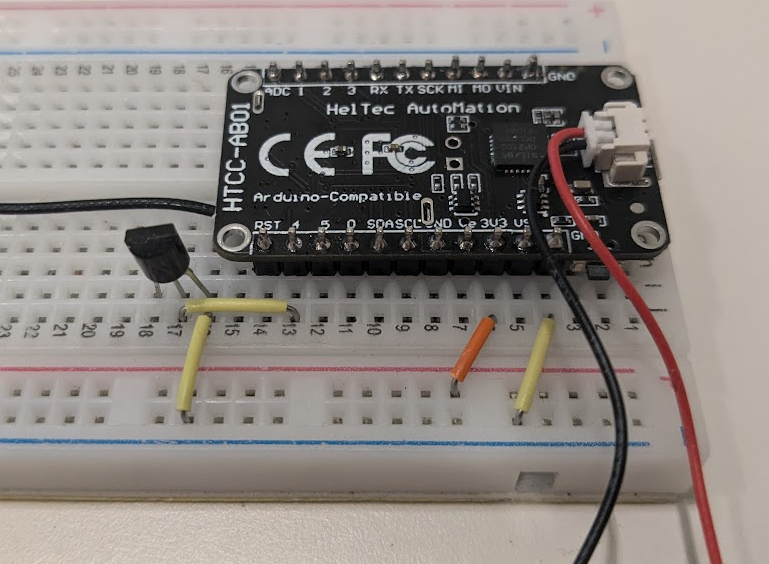
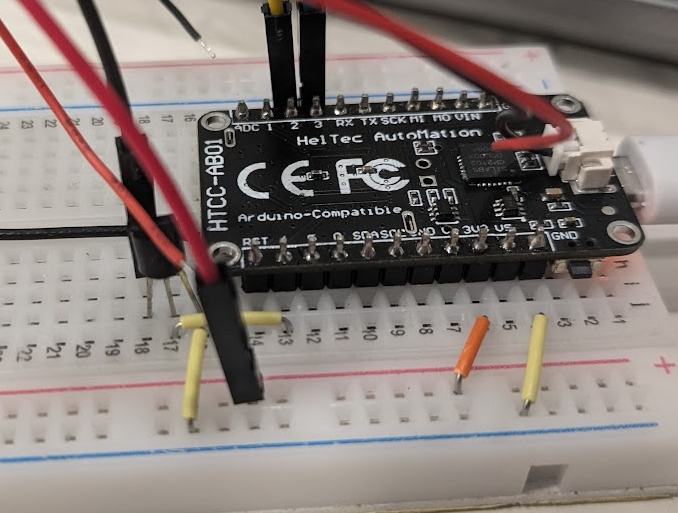
Si vous ne voyez rien, vérifiez que vous avez bien effectué les branchements…

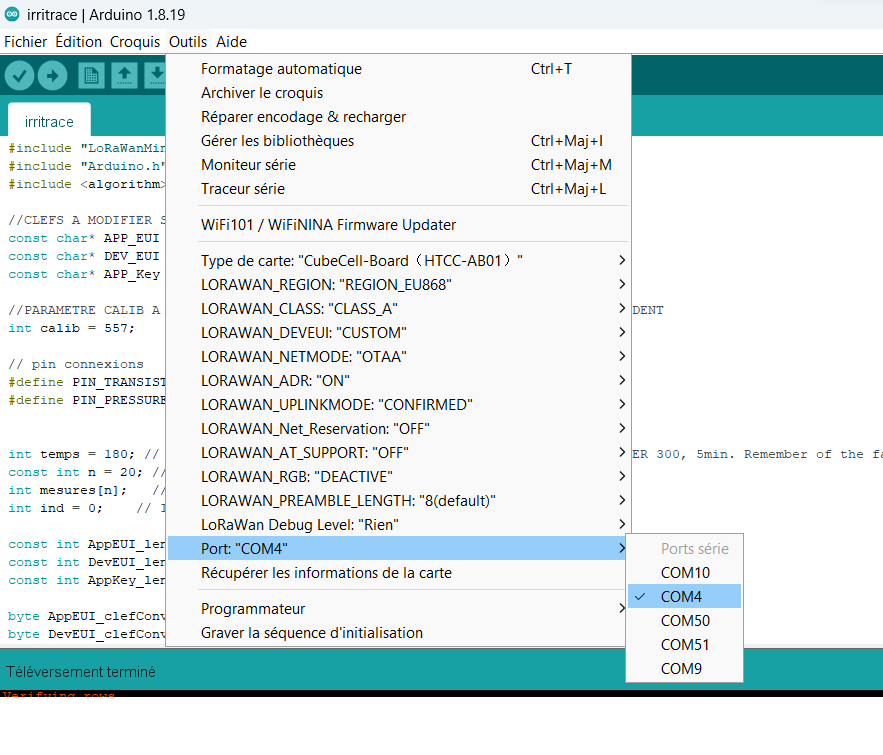
Etape 3 : Si vous avez bien réalisé la section 3, retournez sur la page de TheThingsNetwork que vous aviez normalement laissé de côté. Vous devez copier les clefs en appuyant sur le bouton  ).
).
Collez les clefs dans le bon sens (AppEUI avec AppEUI, devEUI avec devEUI, appKey avec AppKEY) dans le code arduino.
Attention à bien supprimer au préalable les clefs initialement mises à la place des clefs ! Pour cela, faites un double-clic sur l’un des 0 de la suite de 0 à remplacer.
Etape 3 : Cliquez sur le bouton ![]() en haut de la fenêtre Arduino. C’est parti ! L’opération peut prendre quelques secondes. Son avancement est écrit en orange dans la section noire en bas de la fenêtre. (10%…20%… etc)Si vous n’avez pas de bug, il doit être écrit quelque-part « Téléversement terminé ».
en haut de la fenêtre Arduino. C’est parti ! L’opération peut prendre quelques secondes. Son avancement est écrit en orange dans la section noire en bas de la fenêtre. (10%…20%… etc)Si vous n’avez pas de bug, il doit être écrit quelque-part « Téléversement terminé ».
Sinon, nous vous invitons à lire cette page pour identifier le bug








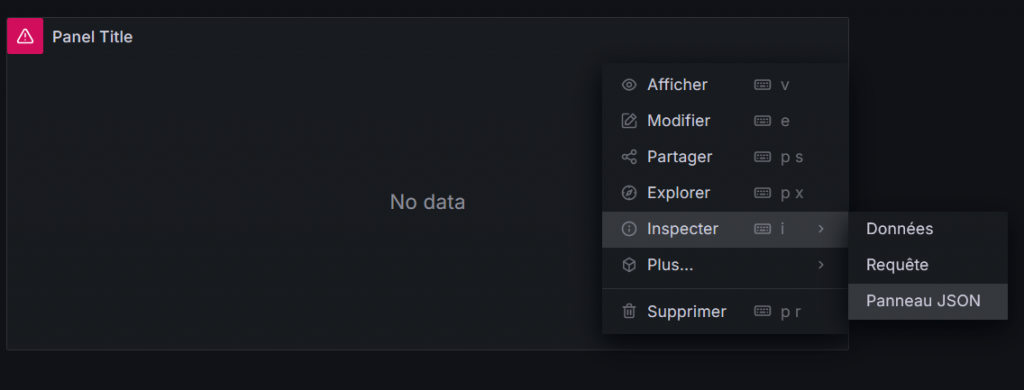
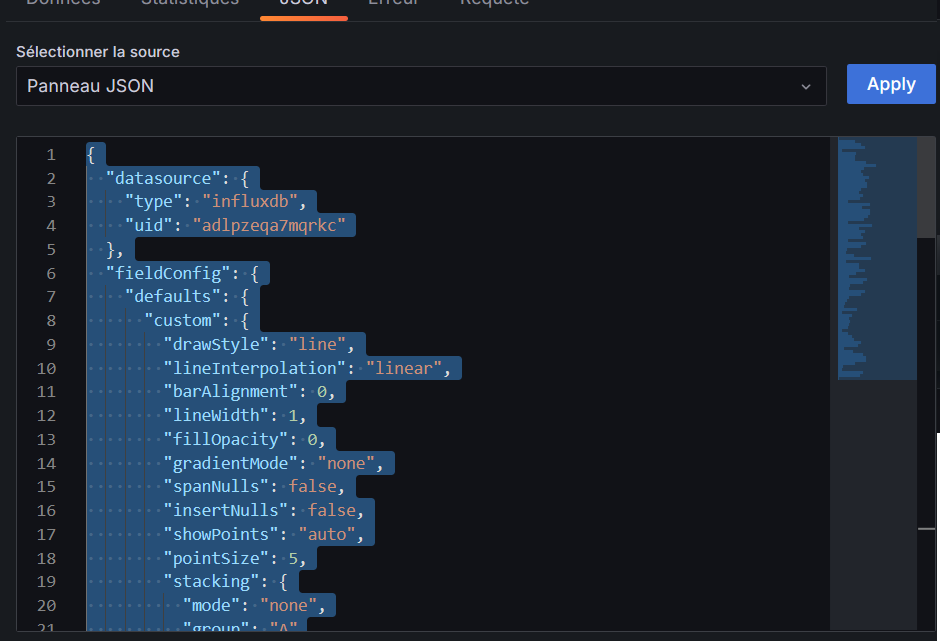
Etape 4 : Passons à l’édition de ce nouveau bloc de visualisation. En passant la souris dessus, on peut apercevoir un bouton en haut à droite ![]() .En cliquant sur ce bouton, on sélectionne « inspecter » puis « Panneau JSON« .
.En cliquant sur ce bouton, on sélectionne « inspecter » puis « Panneau JSON« .
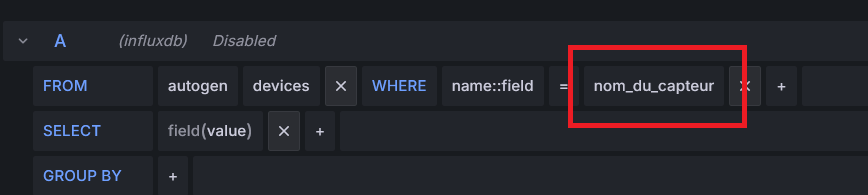
Etape 7 : Maintenant que le bloc est configuré comme une visualisation de sonar, il ne reste plus qu’à lui renseigner le nom de votre sonar (celui que vous aviez mis dans TTN, par exemple sonar-01). Cela est particulièrement important si vous avez plusieurs objets connectés dans la même app, pour filtrer les données et n’afficher que celui qui vous intéresse.
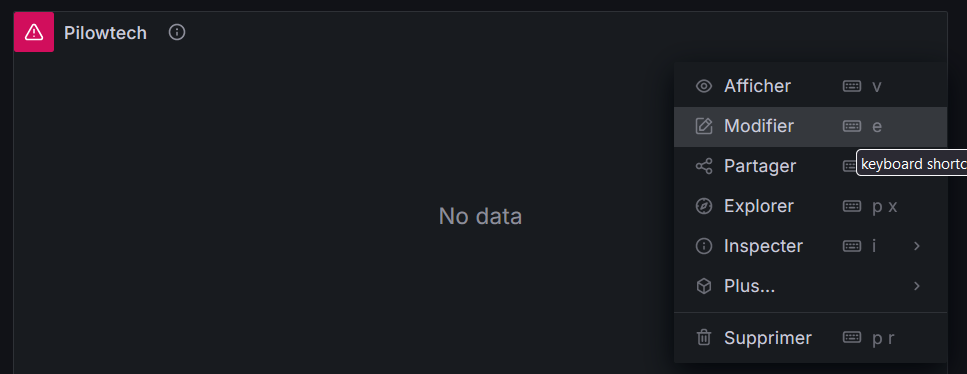
Pour ce faire, passez la souris sur le bloc pour faire réapparaître le bouton en haut à droite . En cliquant sur ce bouton, sélectionnez « Modifier ».
. En cliquant sur ce bouton, sélectionnez « Modifier ».